Bir diğer mevzu da kanat kabloları ve kanat/gövde konektörleri..
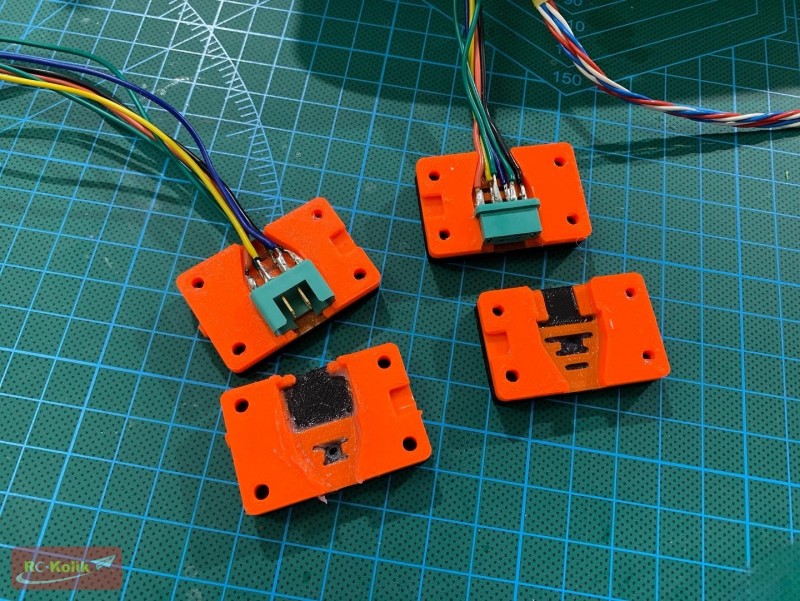
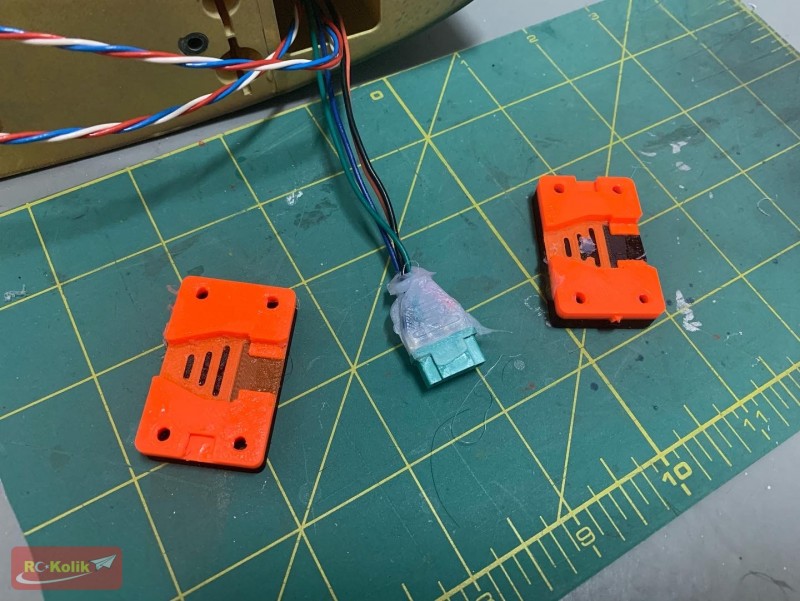
Kanattaki servo kabloları ve bunların gövdeye aktarılmasında Panterde olduğu gibi powerbox'ın MPX konektörlerle hazır yapılmış olarak satılan konektör/kablo setlerini kullandım. Retractlar ve ışıkların kabloları için ise yine MPX konektör kullanarak kendim yaptım. Bu konektörlerde ilk kez thingiversede bulup bastığım kalıplar ve sıcak silikon ile kabloları emniyete alma teşebbüsünde bulundum. Tam hayallerimdeki gibi olmasa da işe yarayacak birşey oldu. Sıcak silikon yerine epoksi ile yapmak daha mantıklı olacak sanırım..
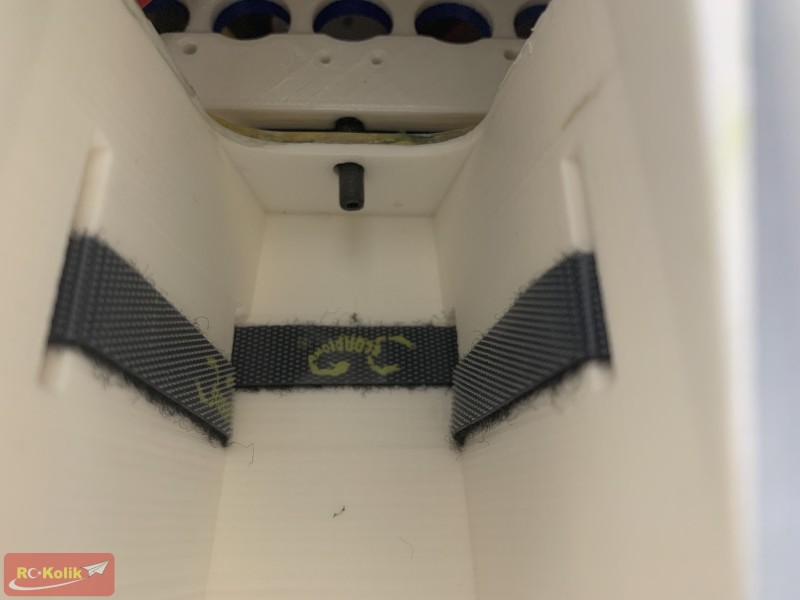
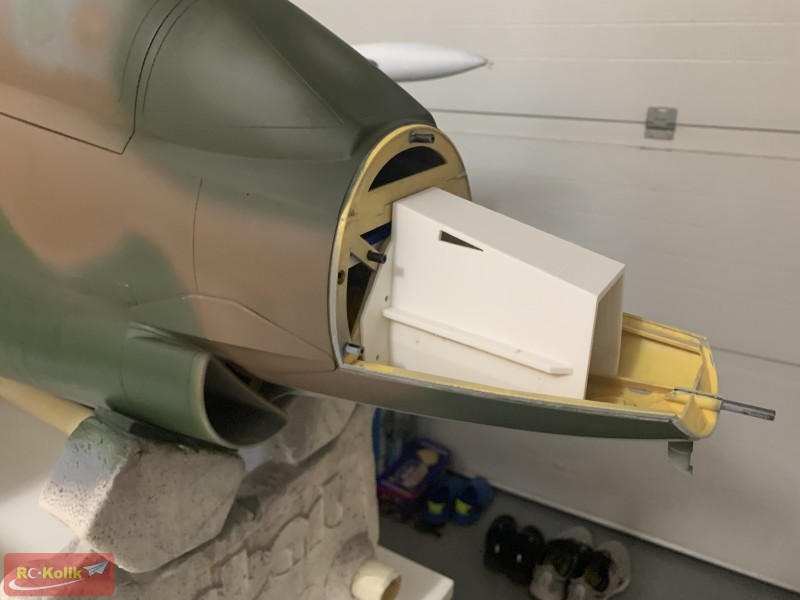
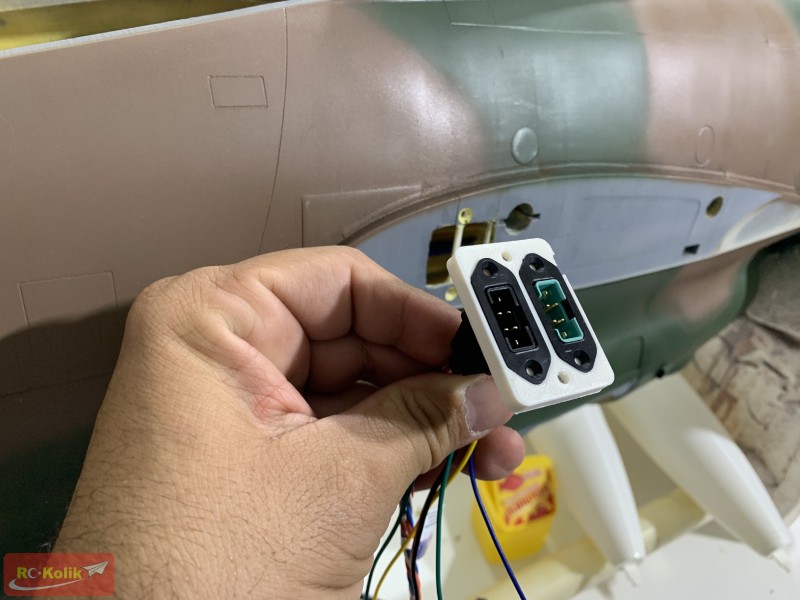
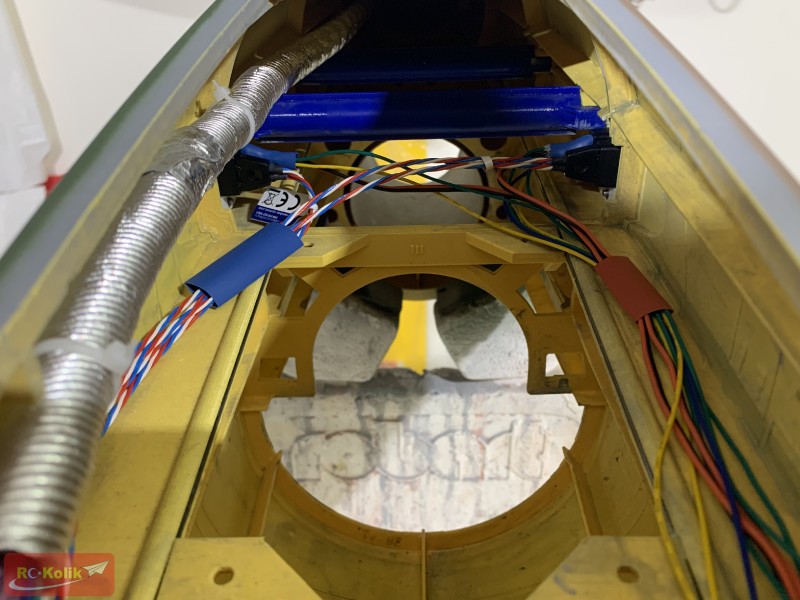
Kanattan gelen kablo ve konektörlerin gövde tarafındaki karşılıkları da hazırlandılar: dışlarda powerbox konektörleri ve servo kabloları, içte ise benim yaptığım konektörler görülüyor. Sol kanatta iki sağ kanatta bir ışık olduğu için kablo sayıları farklı, iki kablo retract için ve her bir ışık için ikişer kablo şeklinde bir dağılım var.

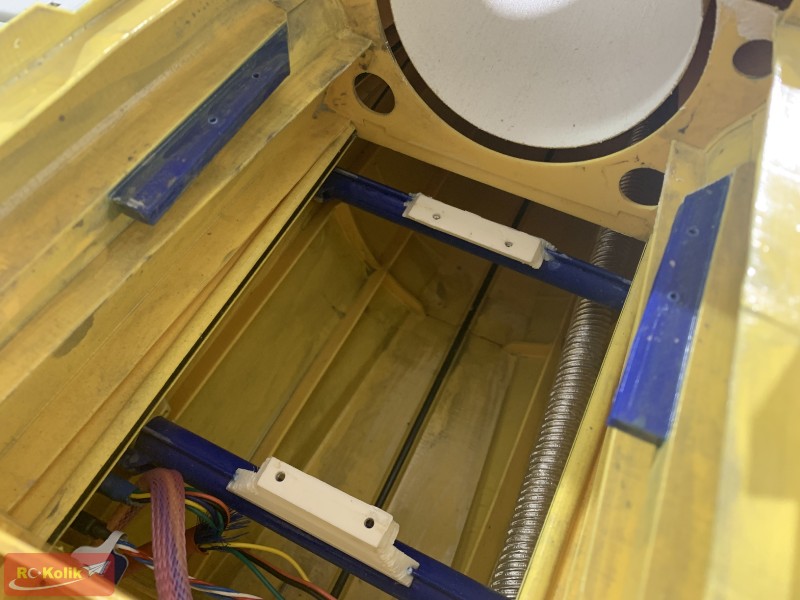
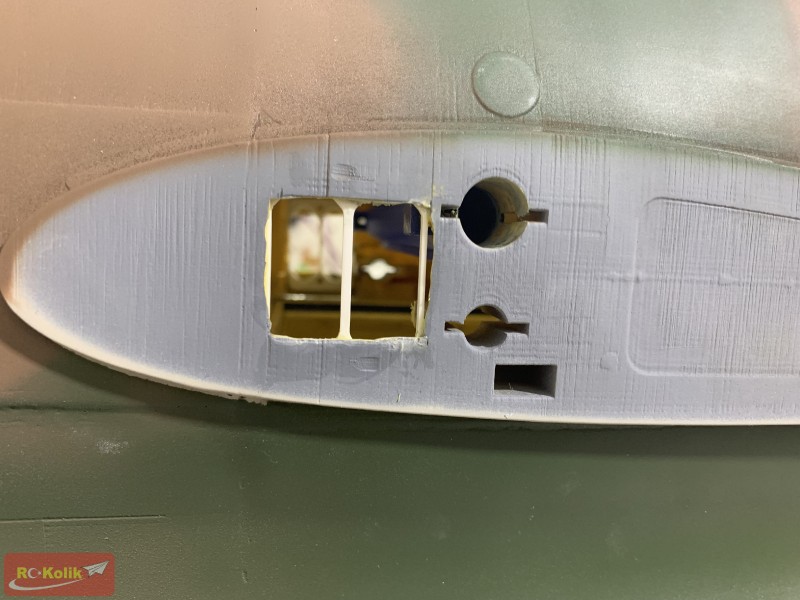
Konektörleri gövde tarafında sabitleyebilmek için bir çerçeve montaj sistemi tasarlayıp ABS kullanarak bastım. Bu sistem ikişer parçadan oluşuyor. İlk parça, 2mm kalınlığında basit bir çerçeve (alttaki parçalar). Bu gövde içindeki yere yapıştırılacak. Gövdede bu konektörleri takmayı düşündüğüm kısım fazlaca ince, güvenemedim, o yüzden de bu çerçevelerle desteklemeye karar verdim. Ayrıca kullanacağım civatalar gömmebaş olacak (kanadın tam oturabilmesi için silme bir montaj gerekli). Mevcut haliyle gövdenin kalınlığı gömmebaş cıvata için uygun bir delik açmaya yetecek kadar olmadığı için de bu ilave çerçeveye ihtiyaç oldu. Diğer parçalar ise konektörlerin takılacağı ve civatalar ile yerlerine sabitlenecek daha kalın olan parçalar (üsttekiler)
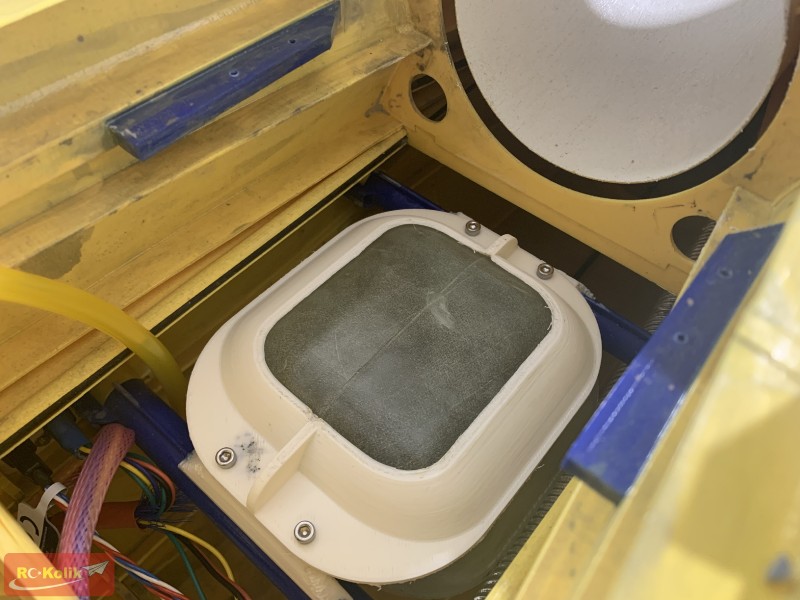
İlk olarak destek çerçevelerini gövde içindeki yerlerine yapıştırdım. Yapıştırma yine aseton kullanılarak "kaynatma" şeklinde yapıldı.
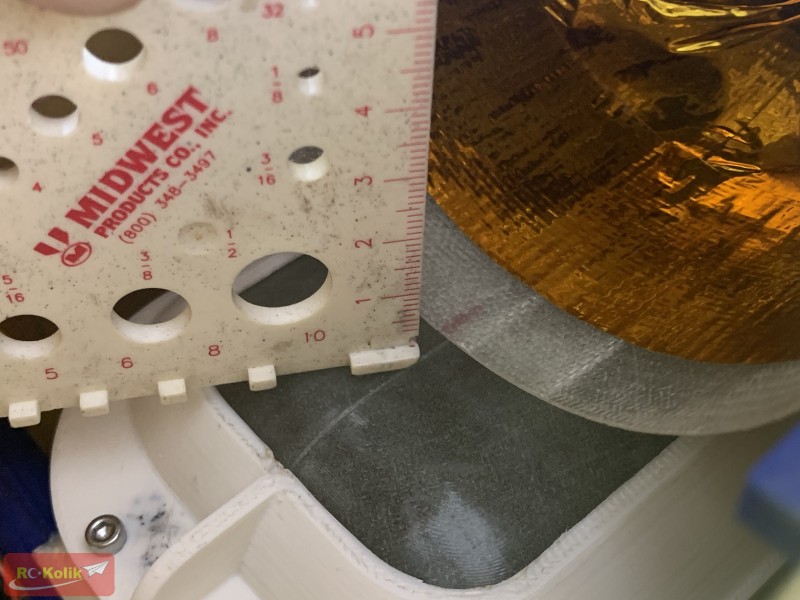
Sonra içerden delikleri deldim:
Son olarak da gömmebaş civataların tam oturabilmesi için delikleri dışarıdan açılı olarak genişlettim:
Konektörlerin takılacağı parçaların arka kısmında m3 somun için yuva tasarlamıştım, bu yuvalara somunları oturtup konektörleri yerleştirdim:
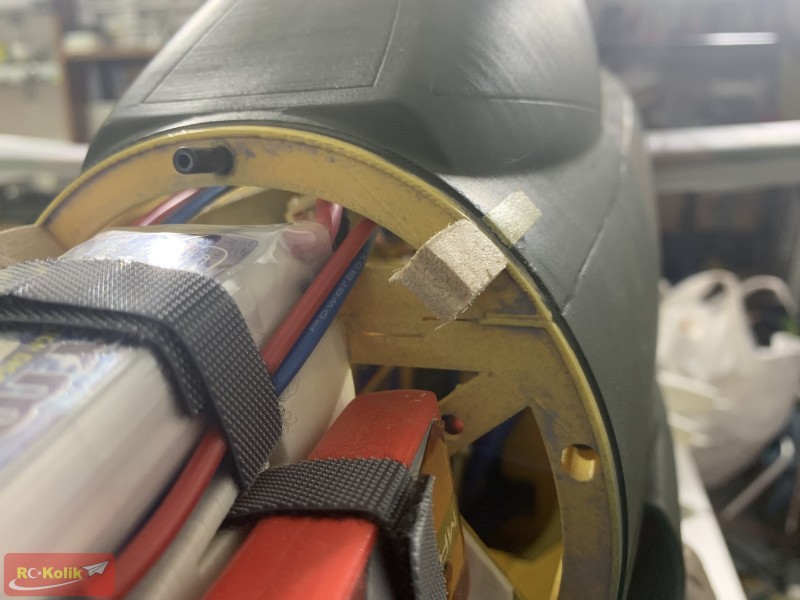
Sonrasında bu çerçeveleri içerden yerlerine oturtup m3 gömmebaş civatalar ile sabitledim:
sahada montaj sırasında kanat karbon borulara geçirilip gövdeye yeterince yakınlaştırılıp kanattaki yuvasında duran konektörler gövdedeki işlerine takılıp kanat sonuna kadar ittirilecek. Sökerken de tam tersi sırayla işlemler tekrarlanacak.
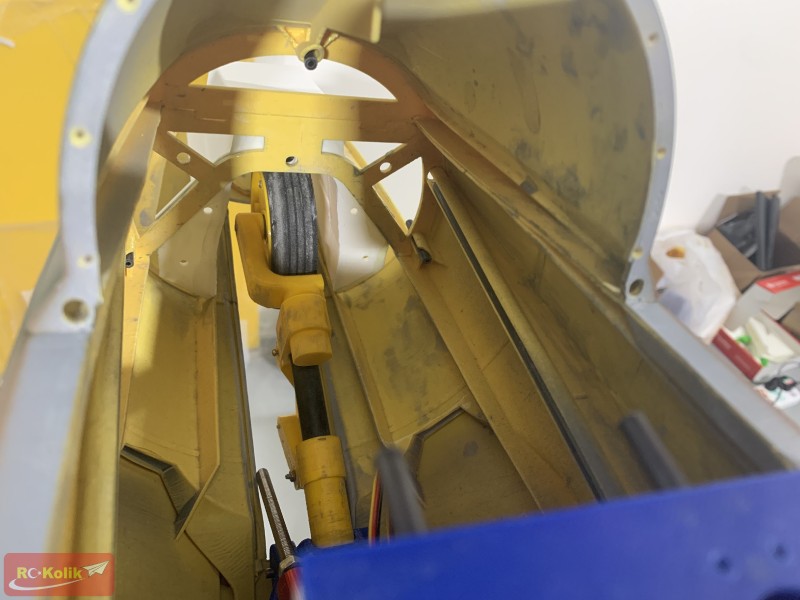
Gövde içinde de servo kablolarını bir taraftan, ışık ve retract kablolarını da diğer taraftan gidecek şekilde yerleştirmeyi planlıyorum. Bu biraz olsun düzenlemede ve kargaşayı önlemede faydalı olacaktır.
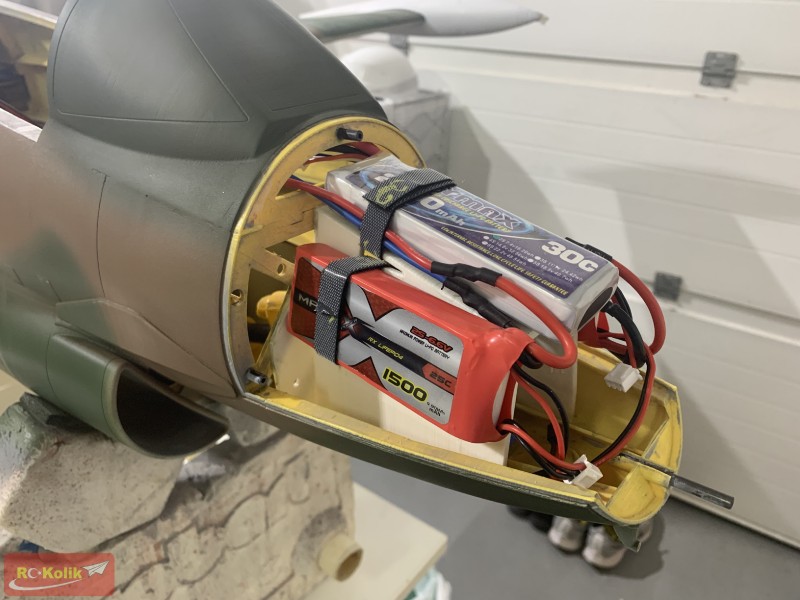
Bugünün menüsünde de elektronik aksamın niahi olarak yerleştirilmesi olacak

Buarada artık pek çok şey elde ve hazır olduğu için modelin uçmaya hazır ağırlığını ölçme imkanım oldu. Çok süper hassas bir ölçüm olduğunu iddia edemeyeceğim ama tam dolu depo ile, yani kalkış ağırlığı, 6500 gram olacak gibi görünüyor. Tam dolu depo da yaklaşık 6 dakikalık bir uçuşa denk geliyor. Chris'in modeli, elektrikli setup ve yaklaşık 3 dakikalık yakıt (pil) ile 6700 gram olarak uçuyor. Üstelik o hep 6700 gram

benim modelim inişe gelirken 6000 grama yakın bir ağırlıkta olacak. Bu da geçen seneden beri aklımda olan teorinin ve hesaplamalarımın bir ispatı gibi oldu diyebilirim! Me-262 için çok iyi haber






















 Emeklerine sağlık kardeşim.
Emeklerine sağlık kardeşim. 
 Atkestanesi kılıklı lepistesin geri sayımı aynı zamanda Me-262'nin geri sayımı malum
Atkestanesi kılıklı lepistesin geri sayımı aynı zamanda Me-262'nin geri sayımı malum